Features RTAB-Map
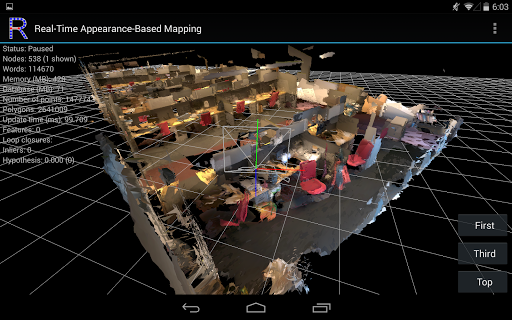
RTAB-Map (Real-Time Appearance-Based Mapping) is an Open Source RGB-D Graph-Based SLAM approach based on an incremental appearance-based loop closure detector.
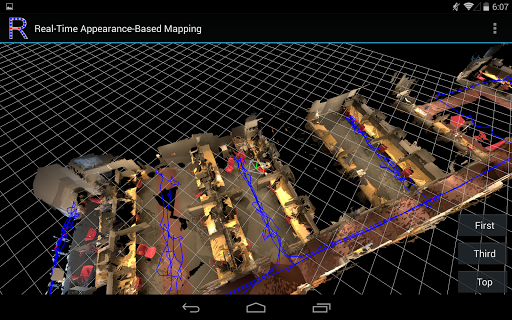
The loop closure detector uses a bag-of-words approach to determinate how likely a new image comes from a previous location or a new location.
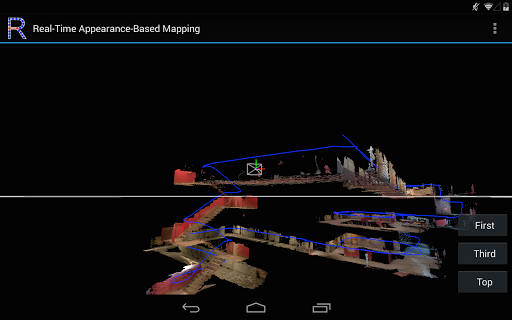
When a loop closure hypothesis is accepted, a new constraint is added to the maps graph, then a graph optimizer minimizes the errors in the map.
A memory management approach is used to limit the number of locations used for loop closure detection and graph optimization, so that real-time constraints on large-scale environnements are always respected.Model of the featured video on Sketchfab here: https://skfb.ly/6nryXFor questions, ask on the forum or on Github: http://introlab.github.io/rtabmap/#troubleshooting*** It works only on Project TangoFeatures:* Online 3D scanning/mapping of the environment* Online loop closure detection and map correction* Save in DB format (RTAB-Map desktop format)* Export in PLY or OBJ (with textures up to 720p)* Multi-session mapping (save and continue later)* Localization-only mode (in a previous session)* Trajectory mode where point clouds are not saved (similar to Area Learning)* Post-processing options (e.g., use Bundle Adjustment to align textures)* Added "Settings->Mapping->Save GPS" option (default disabled) to save GPS coordinates in the database.
See issue #226 on projects page for more info.
Camera Features
Advanced camera features with editing capabilities.
Fitness Tracking
Track your workouts and monitor your health metrics.
Learning Tools
Enhance your learning experience with interactive features.
See the RTAB-Map in Action
Get the App Today
Available for Android 8.0 and above